|
Wat is de toekomst van leren?
FIRST® LEGO® League (FLL®) teams gaan op zoek naar het antwoord op deze
vraag.
Meer dan 240.000 kinderen, van 9 tot 16 jaar, (in de Benelux van 9 tot 15 jaar) uit meer dan 82 verschillende landen gaan de uitdaging aan in de FLL WORLD CLASS Challenge 2014/2015. Zij gaan onderzoeken hoe de manieren waarop wij kennis en vaardigheden vergaren in de 21e eeuw verbeterd kunnen worden. Het doel daarbij is dat de teams aan volwassenen gaan uitleggen wat de behoeften van kinderen zijn op het gebied van leren en ontdekken. Maak je klaar voor deze uitdaging, de FLL WORLD CLASS! De FLL daagt kinderen uit om te denken
als wetenschappers en technici. Tijdens het FLL WORLD CLASS seizoen
ontwerpen, bouwen en testen de teams een robot met LEGO MINDSTORMS® om
hier vervolgens |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
HET PROJECTIn het FLL World Class Project zal jullie team:
Denk erover naJullie hebben vast al veel dingen geleerd, meer dan jullie kunnen tellen. Leren begint al vanaf je geboorte. Je leert lopen, je veters strikken en hoe je deze challenge moet lezen. Misschien heb je leren dansen, schilderen of geleerd een instrument te bespelen. Misschien heb je wel geleerd hoe je een perfect doelpunt moet scoren. TIP: Zoeken jullie een leuke manier om van start te gaan met het FLL WORLD CLASS Project? Download WC Leren communiceren Er zijn veel verschillende vakken, zoals geschiedenis, natuurkunde, tekenen en wiskunde. Om deze vakken met plezier en succes te volgen heb je verschillende vaardigheden nodig. Veel van deze vaardigheden leer je al op jonge leeftijd. Deze zijn bijvoorbeeld:
Er is veel te leren, maar iedereen leert op zijn eigen manier. Er zijn verschillende manieren om een robot te bouwen, zo zijn er ook verschillende manieren om nieuwe dingen te leren. We noemen deze verschillende manieren ‘leerstijlen’. De meeste mensen leren door verschillende stijlen te combineren, bijvoorbeeld door te luisteren, te kijken, te lezen, te schrijven, te bewegen, en zelfs door te spelen. Wat is jullie favoriete manier om nieuwe kennis op te doen of vaardigheden aan te leren? Wat jullie favoriete manier ook is, er zijn vele verrassende methodes die mensen kunnen helpen bij het leren. Ook in de FLL, bijvoorbeeld:
Sommige leerstijlen en methodes zorgen ervoor dat leren leuker wordt, anderen zorgen ervoor dat informatie beter onthouden wordt. Jullie Project Challenge voor het FLL WORLD CLASS seizoen is een betere of innovatieve manier te vinden om iemand te helpen bij het leren. Kies jullie FLL WORLD CLASS onderzoeksvraagAls eerste gaan jullie een onderwerp kiezen en kijken hoe mensen daar meer over leren. Wetenschappers, leraren, psychologen en anderen ontdekken steeds meer over hoe wij leren. Net als onderzoekers zullen jullie een “onderzoeksvraag” gaan bedenken en het antwoord daarop zoeken. We noemen dit jullie FLL WORLD CLASS onderzoeksvraag. TIP: In hoofdstuk 4.3 van de Coach Wegwijzer is een schema te vinden dat kan helpen bij het ontwikkelen van jullie lijst. Ieder teamlid voor zich – Denk, om te beginnen, eens aan alle onderwerpen waarover je iets hebt geleerd in de afgelopen dag, week of maand. Maak hiervan een lijst. Denk bijvoorbeeld eens aan de dingen die je hebt geleerd op de volgende plekken:
Kijk naar de lijsten van ieder teamlid. Wat heb je geleerd en hoe heb je dit geleerd? Vond je het een moeilijk onderwerp? Waren er bepaalde leerstijlen of methodes die het leren makkelijker maakten? Met het hele team – Kies één onderwerp uit waar jullie allemaal in geïnteresseerd zijn. Gebruik dit onderwerp om jullie FLL WORLD CLASS onderzoeksvraag op te stellen. Het onderwerp kan van één van de lijsten komen, maar het kan ook een ander onderwerp zijn dat het hele team interesseert. Het onderwerp mag breed zijn (bijvoorbeeld ‘wetenschap’) of juist specifiek (bijvoorbeeld ‘waaruit bestaat een menselijke cel?’). Schrijf jullie FLL WORLD CLASS onderzoeksvraag op de volgende manier op: “Hoe kunnen we de manier waarop iemand leert over [jullie onderwerp] verbeteren?” Ga daarna op onderzoek uit en kijk hoe mensen nu leren over jullie onderwerp. Jullie kunnen hierbij van alles gebruiken; zoals boeken, interviews, het internet, radio, TV of andere hulpmiddelen. Probeer met deze hulpmiddelen het antwoord te vinden op vragen zoals:
Dit is misschien ook een goed moment om contact op te nemen met een deskundige. Dat kan iemand zijn die lesgeeft over het onderwerp dat jullie hebben gekozen of er dagelijks mee te maken heeft. Hoe heeft deze persoon veel geleerd over het onderwerp? Waarom is die persoon enthousiast over het onderwerp? Vond hij of zij het onderwerp altijd al interessant of later pas? Wat zijn de nadelen van de manier waarop mensen nu meer leren over het onderwerp? Met het hele team – Na jullie brainstorm en het onderzoek hebben jullie waarschijnlijk al goede ideeën voor het antwoord op jullie FLL WORLD CLASS Onderzoeksvraag. Denk goed na of jullie nog meer informatie nodig hebben voordat jullie beginnen met het ontwerpen van jullie oplossing. Bedenk een innovatieve oplossingNu jullie een FLL WORLD CLASS Onderzoeksvraag hebben gekozen, is het tijd om aan een innovatieve oplossing te gaan werken – eentje die nuttig is voor de samenleving. Dit kan zijn door een bestaande oplossing te verbeteren, een bestaande oplossing op een andere manier te gebruiken of door iets heel nieuws uit te vinden. Jullie oplossing kan de manier van leren voor een teamlid of iemand anders verbeteren. Denk bijvoorbeeld aan:
Met het hele team – Denk erover na! Werk samen! Brainstorm! Deel en bespreek al je ideeën. Het ‘gekke idee’ van één van de teamleden kan het begin zijn van jullie innovatieve oplossing. Voor een goede oplossing hebben jullie misschien alle creativiteit en vindingrijkheid van jullie team nodig. Of de oplossing kan zo voor de hand liggen dat je je afvraagt waarom we niet al lang op die manier leren. Denk er over na hoe iemand jullie oplossing werkelijkheid kan maken. Maak hierbij gebruik van het onderzoek dat je eerder hebt gedaan.
Onthoud dat jullie oplossing een verbetering kan zijn van iets dat al bestaat, iets kan zijn dat al bestaat en op een nieuwe manier gebruikt wordt of juist iets compleet nieuws kan zijn. Deel met anderenAls jullie een oplossing gevonden hebben, is het tijd om de onderzoeksvraag en de oplossing te delen met anderen en uit te leggen waarom de oplossing helpt. Met het hele team – Denk na over wie er geholpen kan worden of te maken krijgt met jullie oplossing. Hoe kunnen jullie die mensen bereiken? Kunnen jullie het probleem en de oplossing presenteren aan mensen die lesgeven of les krijgen? Kunnen jullie de ideeën van jullie team delen met een deskundige die jullie heeft geholpen tijdens het project? Denk er ook over na of jullie je project ook nog met anderen kunnen delen? Kunnen jullie het project laten zien aan andere leerlingen bij jullie op school? Zijn er misschien nog andere groepen die geïnteresseerd zouden zijn in jullie oplossing? Kijk ook of er nog mensen zijn die jullie feedback kunnen geven op jullie idee. Feedback krijgen en verbeteringen doen horen bij het ontwerpen van een goede oplossing. Wees niet bang om deze feedback te gebruiken om jullie oplossing en ideeën nog beter te maken. Gebruik een creatieve manier om jullie FLL WORLD CLASS Onderzoeksvraag en oplossing te presenteren. Gebruik hierbij de talenten van je teamleden. Jullie kunnen een presentatie geven, een website maken, een toneelstukje opvoeren, een stripboek, rap of poster maken. Flyers uitdelen, schrijf een gedicht, een liedje of een verhaal. Wat is de beste manier om mensen te bereiken? Het delen van de oplossing mag op verschillende manieren: simpel of ingewikkeld, serieus of grappig, als de mensen er maar van leren. En vergeet niet om plezier te hebben, dat is het belangrijkste!
Presenteer je oplossing op een (regio)finaleAls jullie naar een FIRST® LEGO® League finale gaan, bereid dan een presentatie voor de juryleden voor waarin jullie het probleem en de oplossing delen. In de presentatie kunnen jullie gebruik maken van: posters, PowerPoint slides*, modellen, filmpjes* of onderzoeksmaterialen. Wees creatief! Denk eraan dat jullie een blijvende indruk willen achterlaten. * Vraag wel goed na welke middelen beschikbaar zijn tijdens een finale. Om kans te maken op de Projectprijs en een kwalificatie voor de Champion’s award moeten jullie:
Juryleden verwachten onder andere dat jullie:
Meer informatieOnthoud dat de officiële FLL Challenge documenten uiteindelijk altijd bepalen wat jullie moeten doen voor het Project en de robotwedstrijd van dit jaar. Als jullie niet zeker zijn hoe je hiermee moet beginnen, dan kunnen de volgende hulpbronnen jullie op weg helpen:
Als jullie nog meer vragen over het project hebben stuur dan een e-mail naar fll@techniekpromotie.nl. Leren hoort bij het leven, je doet het elke dag. Nu hebben jullie de kans om na te denken over hoe mensen het beste iets nieuws kunnen leren. Hiermee maken jullie een belangrijk verschil in iemands leven. Misschien zijn jullie dit zelf, iemand die jullie kennen of iemand die jullie nog nooit hebben ontmoet. Met de FLL maken jullie leren een ervaring van wereldklasse! |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Veldopbouw
Het veld is waar de robotwedstrijd plaatsvindt.
HET BOUWEN VAN EEN TAFELDe robotwedstrijd vindt plaats op een
speciaal ontworpen tafel. Als jullie zo’n tafel nog niet hebben, zullen
jullie er dus één moeten bouwen. De beschrijving die jullie hieronder
vinden, is simpel – rekening houdend met veiligheid, gewicht, hoogte en de
kosten – maar zolang het oppervlak maar glad is en de randen de juist maat
hebben, kunnen jullie zelf bepalen hoe jullie de ondergrond bouwen. Het is
niet moeilijk deze tafel te bouwen, maar het vereist wel wat
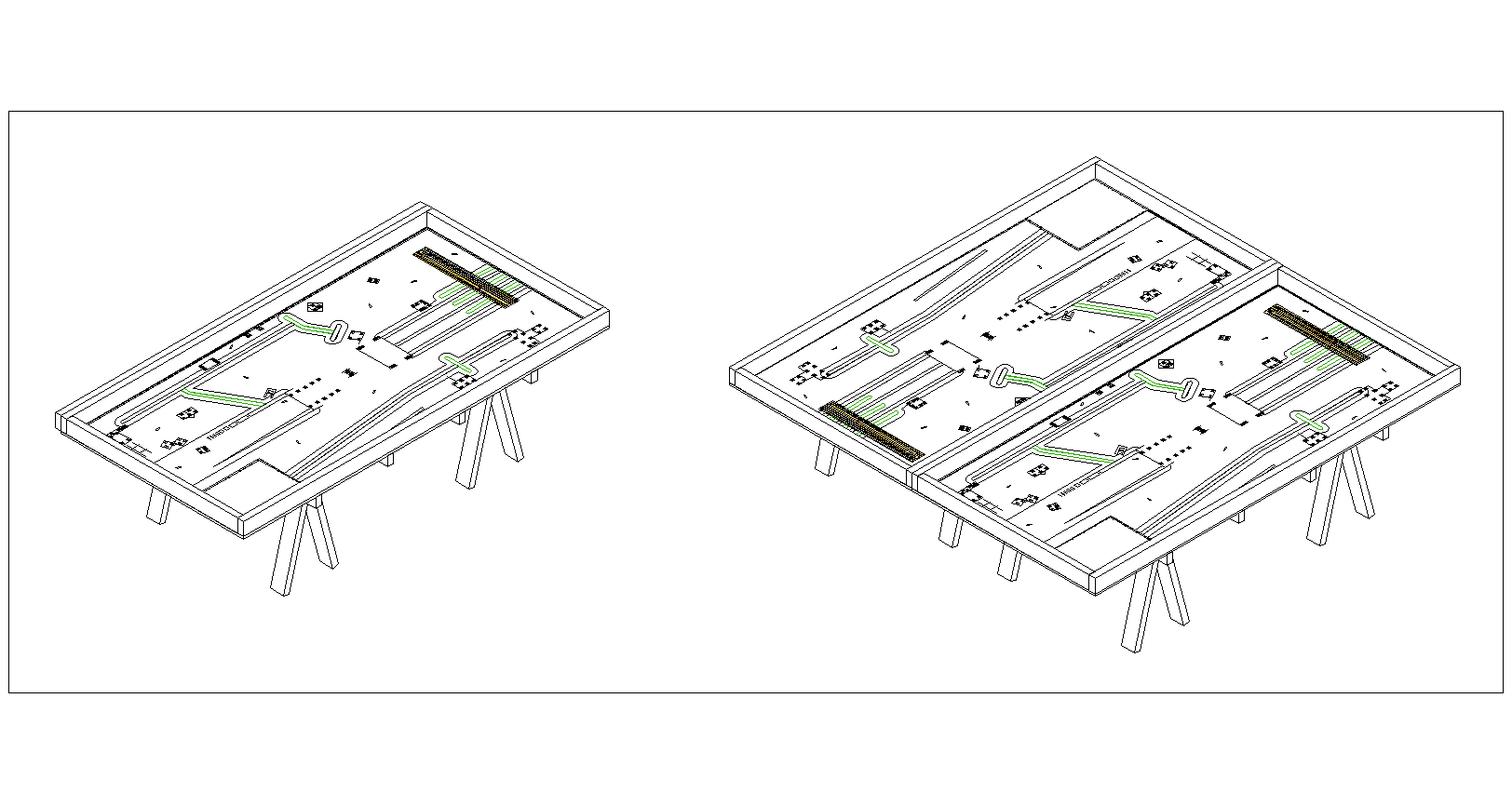
handvaardigheid. Tijdens een (regio)finale worden twee tafels tegen elkaar opgesteld, maar jullie komen maar aan één kant in actie, jullie hoeven maar een tafel te bouwen om op te oefenen. We noemen jullie oefentafel een halve tafel. Meestal heeft de robotgame een “gedeeld” missiemodel, dat gedeeltelijk op jullie tafel leunt en gedeeltelijk op die van de tegenstanders. Dus, naast dat jullie een halve tafel bouwen, moeten jullie ook een klein stukje van de andere tafel bouwen, waar dat model op kan leunen. Dat noemen we het “dummygedeelte” Hier zijn hier de instructies voor het bouwen van een “halve tafel” en het dummygedeelte: Materialen
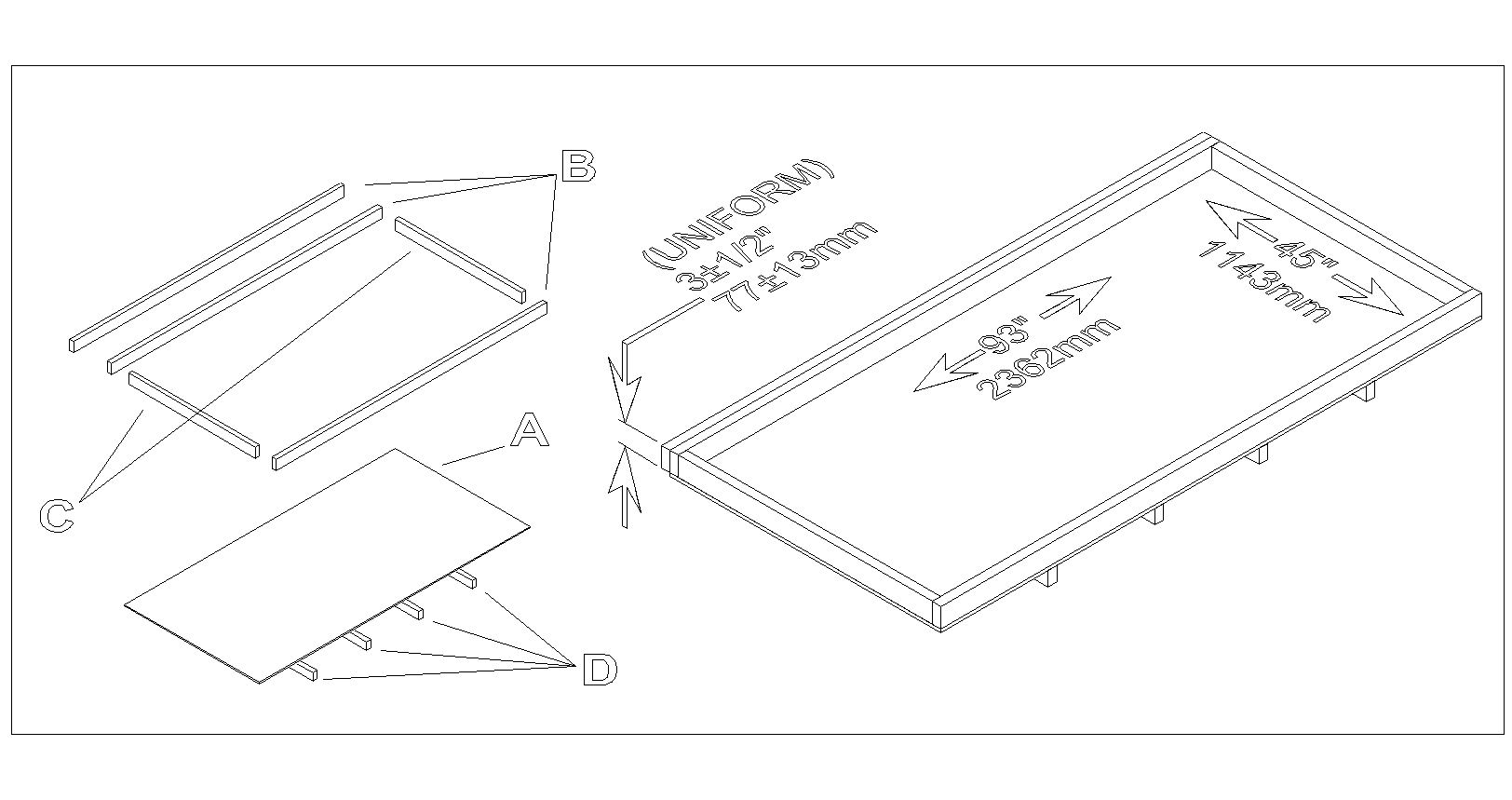
Onderdelen
MONTAGEStap 1.Bepaal welke kant van het triplex of multiplex tafeloppervlak (A) de minst vlakke is en gebruik deze als de onderkant. Schroef de versteviging (D) vast aan de onderkant (ongeveer iedere 45 cm). Controleer of de schroeven volledig zijn aangedraaid en niet uitsteken. Schuur eventuele splinters. Stap 2.Schroef de muren (B, C) vast aan de bovenkant rond de bovenomtrek van het tafeloppervlak (A). De muur-tot-muur afmetingen moeten voldoen aan de maten 2362 ± 3 mm / 1143 ± 3 mm De hoogtes van B en C moet voldoen aan de maat 77 ± 13 mm. Let hierbij op het symbool ±. Dat betekent dat de maximaal toegelaten hoogte 90mm is en de minimaal toegelaten hoogte 64mm Alle randen moeten een gelijke hoogte hebben, en ook alle tafels op een toernooi moeten van gelijke hoogte zijn. Tafelhoogtes op een toernooi kunnen anders zijn dan die van jullie oefentafel. Stap 3.Plaats met de hulp van een andere persoon deze tafel op de schragen (of kratten, of iets anders dat kort en stevig is). |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
MISSIESFLL World Class
Deuren openen
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
REGELS, PROCEDURES, UITGANGSPUNTEN EN DEFINITIESFILOSOFIE1 – GRACIOUS PROFESSIONALISM™
2 – INTERPRETATIE
3 – VOORDEEL VAN DE TWIJFEL
4 – VARIATIE
INFORMATIE5 – RANGORDE/AUTORITEIT
6 – ROBOT GAME ONDERSTEUNING
7 – COACH BIJEENKOMST
WEDSTRIJD DEFINITIES8 – MISSIE
Voorbeeld: Als er een missie is waarbij je een stapel in oostelijke richting moet omduwen en de robot bereikt de stapel niet, dan mag je dit later gewoon nog eens proberen. Echter, als de robot de stapel in westelijke richting duwt, kun je de missie niet nog eens proberen, omdat de stapel niet hersteld zal worden. 9 – WEDSTRIJD
LOCATIE DEFINITIES10 – VELD
11 –
BASIS
|



























| TEAMS DIE ALLES HEBBEN GELEZEN | TEAMS DIE NIET ALLES HEBBEN GELEZEN |
| Hebben minder vragen | Werken in het duister |
| Hoeven minder dubbel werk te doen | Moeten opnieuw beginnen en verliezen tijd |
| Hebben minder verassingen tijdens finales | Leren veel van … scheidsrechters |
| Scoren hoger | Scoren lager |
| Hebben meer plezier | Raken gestresst |
Wil je meer informatie over jouw regiofinale, kijk dan op de pagina regiopartners voor de contactpersoon van jouw regio.
Data regiofinales
| Regio | Datum finale | Locatie |
| Achterhoek | n.n.b. | n.n.b. |
| Arnhem/Nijmegen | n.n.b. | n.n.b. |
| België (Kortrijk) | za 8-11-2014 | VIVES campus Kortrjik, Doorniksesteenweg 145, Kortrijk |
| België (Leuven) | za 15-11-2014 | KHLeuven, Departement Gezondheidszorg en Technologie |
| Belgisch Limburg | vr 28-11-2014 | PXL Campus, Vilderstraat 5, Hasselt |
| Delft | za 13-12-2014 | Science Center Delft, Mijnbouwstraat 120, Delft |
| Drenthe-Zuid | n.n.b. | n.n.b. |
| Eemsdelta | n.n.b. | n.n.b. |
| Eindhoven | za 13-12-2014 | n.n.b. |
| Flevoland | za 13-12-2014 | Stad College, Rooseveltweg 5 Almere |
| Friesland | n.n.b. | n.n.b. |
| Groningen/Drenthe-Noord | n.n.b. | n.n.b. |
| Haaglanden | za 29-11-2014 | Haagse Hogeschool, Den Haag |
| Helmond | za 29-11-2014 | n.n.b. |
| Limburg | za 29-11-2014 | Continium, Museumplein 2 Kerkrade |
| Midden- en Noordoost-Brabant | za 22-11-2014 | n.n.b. |
| Noord-Holland-Noord | n.n.b. | n.n.b. |
| Oost-Nederland | za 29-11-2014 | n.n.b. |
| Rijnmond | vr 12-12-2014 | RDM Campus, Innovation Dock, RDM-kade 59 Rotterdam |
| Rivierenland | n.n.b. | n.n.b. |
| Stedendriehoek | za 13-12-2014 | Deventer |
| Utrecht | za 22-11-2014 | Creative College ROC Midden Nederland, Amersfoort |
| Valleiregio | n.n.b. | n.n.b. |
| West-Brabant | vr 28-11-2014 | Avans Hogeschool, Hogeschoollaan 1 Breda |
| Westland | n.n.b. | n.n.b. |
| Zeeland | vr 28-11-2014 | HZ, Edisonweg 4 Vlissingen |
| Zwolle | vr 28-11-2014 | Deltion College Zwolle |
Overige belangrijke data
| Omschrijving | Datum | Locatie |
| Verzending challenge sets (matten en LEGO modellen) | v.a. eind augustus 2014 | – |
| Internationale kick-off challenge 2014 FLL WORLD CLASS™ | 26 augustus 2014 | VS |
| Benelux kick-off challenge 2014 FLL WORLD CLASS™ | 26 augustus 2014 | Benelux |
| Regionale kick-offs | v.a. 26 augustus 2014 | – |
| BMT Challenge training | 8 september 2014 | De Diamant, Someren |
| Registratieperiode FLL teams | 1 april 2014 t/m 30 september 2014 | – |
| Regiofinales Benelux | v.a. half november t/m half december | |
| FLL Benelux finale | n.n.b. | n.n.b. |
| BMT Regio Congresdag | n.n.b. | n.n.b. |
| World Festival | 22-25 april 2015 | St. Louis, Missouri, VS |
| FLL Open European Championship | n.n.b. | n.n.b. |
Prijzen:
Afhankelijk van de grootte van een finale zullen er een aantal prijzen uitgereikt worden, voor de criteria waar naar gekeken wordt tijdens de finales zie jurering.
Bekijk de prijzen van de kleine finale, middel finale of grote finale.
{kind=link}
{kind=link}
{kind=link}
Champion’s award
De meest prestigieuze award van allemaal, de Champion’s award, bevat vier hoofdelementen:
- Core Values
- Project
- Robotontwerp
- Robotprestatie
Om in aanmerking te komen voor de Champion’s award moet je (goed) hebben gescoord op alle vier de onderdelen, maar natuurlijk moet je ook Gracious Professionalism uitstralen! Bij het toekennen van deze award wordt gebruik gemaakt van rankings van de 3 juryonderdelen (project, robotontwerp en Core Values). De teams die op deze 3 onderdelen het best hebben gepresteerd maken kans op de Champion’s award. Dit is echter niet genoeg, het team moet ook horen bij de 40% best scorende teams bij de robotprestatie-wedstrijd.
In het juryberaad zal besloten worden welk team de Champion’s award wint, bij finale groottes tussen de 16 en 24 teams zal er een eerste en tweede plaats zijn. Bij alle overige finales enkel een eerste award.
Core Values award
Bij een finale waar 24 of minder teams aan mee doen zal er 1 Core Values award worden toegekend, dit aan het team wat het beste heeft gepresteerd op alle onderwerpen die van belang zijn bij de Core Values. Bij een finale waar 25 of meer teams mee doen zullen er 3 awards worden toegekend. Dit zal gebeuren voor de volgende categorieën: Inspiratie, Teamwork en Gracious Professionalism™.
Project award
Afhankelijk van het aantal teams wat mee doet aan een finale zullen er 1 (bij 24 of minder teams) of 3 awards (bij 25 of meer teams) toegekend worden. Indien er 1 award toegekend wordt zal dit een algehele Project award zijn, indien er 3 awards toegekend worden zal er een award zijn in elk van de volgende categorieën: Onderzoek, Innovatieve oplossing, Presentatie.
Robotontwerp Award
Ook bij deze categorie worden afhankelijk van het aantal teams 1 (bij 24 of minder) of 3 awards (bij 25 of meer) toegekend. Indien er 1 award wordt toegekend zal dit een algehele robotontwerp award zijn, indien er 3 awards worden toegekend zal er een award zijn in elk van de volgende categorieën: Robotontwerp, Robotprogrammeer, Robotstrategie & innovatie.
Robotprestatie Award
Deze award wordt toegekend aan het team van wie de robot in de wedstrijd de hoogste prestatie op het competitieveld levert. De hoogste score van de 3 gespeelde wedstrijden telt. Eventuele extra finalerondes tellen hiervoor niet mee.
Extra awards
Afhankelijk van de regio en finale waar je in mee speelt is het mogelijk dat er extra awards worden uitgereikt. Enkele voorbeelden zijn: de Beste Teamcoach, de Doorzetters award en de Vrijwilligers award. Wil je het precies weten? Vraag dan in je eigen regio na welke prijzen er worden uitgereikt.
Jurering
Project.
De projectjury zal aan de hand van jullie presentatie en de mogelijkheid die ze krijgen om vragen te stellen, jullie prestatie op 3 gebieden beoordelen.
Ze zullen kijken naar het onderzoek. Vragen waar de jury zich over buigt zijn bijvoorbeeld: hoe hebben jullie het probleem geïdentificeerd? Na de probleemidentificatie moet je natuurlijk verschillende informatiebronnen raadplegen, hoe hebben jullie dit gedaan? Heb je al je informatie van 1 bron, of heb je meerdere bronnen geraadpleegd? Met wat voor diepgang hebben jullie dit dan gedaan? En hebben jullie gekeken of er bestaande oplossingen zijn?
De jury zal als tweede kijken naar de oplossing. Ze beoordelen hoe innovatief jullie oplossing is en of jullie de oplossing duidelijk kunnen overbrengen naar de jury. Het gaat dan zowel om de uitleg van de oplossing zelf als om hoe het gebruikt zal moeten gaan worden. Hierbij kijkt de jury ook of jullie oplossing (in de toekomst) mogelijk is.
Ten slotte zal de jury ook letten op de presentatie. Hebben jullie voor deze presentatie de oplossing al gedeeld met mogelijke gebruikers? Ook de presentatie zelf is van belang, hebben jullie een creatieve manier gevonden om de informatie over te brengen op de jury en is dit doeltreffend.
Robotontwerp.
Bij de robotontwerp-jury zal de jury jullie beoordelen op verschillende gebieden die te maken hebben met het ontwerpen, bouwen en programmeren van de robot.
Hebben jullie een strategie gehad bij het ontwerp van de robot, hebben jullie van te voren gekeken hoe de robot de verschillende missies zou kunnen gaan uitvoeren? En misschien hebben jullie hier wel ontzettend innovatieve oplossingen voor moeten bedenken. Ten tweede zal de jury kijken naar de programmering, hebben jullie goed na gedacht hoe te programmeren? Zal de robot het wel doen bij een lege batterij en niet bij een volle? Is de programmering die jullie hiervoor hebben moeten maken ook begrijpbaar voor de jury? En zal de robot te allen tijde zijn weg weer terug naar de basis vinden?
Uiteindelijk zal de jury ook kijken naar de uitvoering van het ontwerp, hoe is de degelijkheid van de robot? Zal hij veel hersteld moeten worden tijdens de wedstrijd? Hebben jullie veel onderdelen op de robot zitten die niet nodig zijn? Of hebben jullie veel tijd nodig om tijdens een wedstrijd te bouwen? Ook wordt er gekeken of de robot tegen een stootje kan.
Core Values.
Bij het onderwerp “Core Values” zal de jury zich richten op het beoordelen van de Core Values:
- Wij zijn een team.
- Met hulp van onze coaches en mentoren doen wij het werk om oplossingen te vinden.
- We zijn ons ervan bewust dat onze coaches en mentoren niet alles weten. We leren samen.
- We respecteren het principe van een vriendschappelijke competitie.
- Wat we ontdekken is belangrijker dan wat we winnen.
- We delen onze ervaringen met anderen.
- We laten Gracious Professionalism™ en Coopertition™ zien in alles wat we doen.
- We hebben plezier!
Bij de jurering zijn deze onderverdeeld in 3 categorieën. Als eerste zal de jury kijken naar de inspiratie van het team. Hebben jullie onder andere als team een eigen identiteit? En stralen jullie enthousiasme uit?
Als tweede zal de jury kijken naar het teamwork in het team, hebben jullie een doelmatige manier gevonden om samen te werken? Maken jullie samen besluiten? En hebben jullie het zelf gedaan of (te) veel hulp gekregen van de coach.
Ten slotte zal de jury kijken naar jullie “Gracious Professionalism”, behandelen jullie elkaar en anderen met respect? Als dit zo is, zijn jullie dan ook gelijk betrokken?