|
De FIRST LEGO® League 2009/2010 staat in het teken van transport. Kunnen FIRST® LEGO® League teams de manier beïnvloeden waarop we kijken naar vervoer? De sleutel tot de 'Smart Move' Challenge is om mensen, locaties, goederen en diensten op de veiligste en meest efficiënte wijze te vervoeren. Tijdens deze challenge overwegen de teams vele manieren van transport, waaronder ook transportvormen die niet dagelijks gebruikt worden. Kunnen de teams hun mogelijkheden verbeteren door slimme stappen te ondernemen? Op 2 april opent de inschrijving voor de FIRST LEGO® League (FLL) 2009/2010, een internationale technologie wedstrijd voor kinderen van 8 tot en met 14 jaar. Wereldwijd doen ongeveer 135.000 kinderen mee uit 45 landen. Met een zelfgebouwde robot van LEGO voeren jonge scholieren in groepen allerlei opdrachten uit. In november/december vinden de voorrondes plaats op verschillende locaties in Nederland en België. De beste teams mogen meedoen aan de Benelux finale. Teams kunnen zich tot 30 september inschrijven voor de FIRST LEGO League via de website www.firstlegoleague.nl. Begin september worden de opdrachten bekend gemaakt die de teams met hun zelf ontworpen robot moeten uitvoeren. De deelnemende teams hebben dan acht weken tijd om een robot te ontwerpen en een presentatie voor te bereiden, voordat zij in november/december uitkomen in één van de zeventien regionale finales. Eind januari 2010 volgt de Benelux finale. Deze vindt plaats bij de Hogeschool van Arnhem en Nijmegen. Uiteraard is publiek bij deze finales van harte welkom. Stichting Techniekpromotie uit Eindhoven is verantwoordelijk voor de coördinatie in de Benelux. Dit jaar kunnen maximaal 360 teams meedoen aan de regiofinales. Een team bestaat uit maximaal 10 kinderen en wordt gevormd met vrienden, via een vereniging of op school. Thema De FIRST LEGO League van 2009/2010 staat in het teken van transport. De snelwegen raken verstopt, files maken inmiddels deel uit van ons dagelijks leven en de olieprijzen rijzen de pan uit. Waar houdt het op en hoe kunnen we de toenemende druk op de transportsector verminderen? We moeten een actieplan maken. Elk FLL team gaat de verschillende transportmogelijkheden onderzoeken en zoekt naar een zo efficiënt mogelijke oplossing voor de vervoersproblematiek. Kunnen FLL teams het ‘transport transformeren’? Prijs Dit jaar wordt de FIRST LEGO League voor de zevende maal georganiseerd in de Benelux. Aan de wedstrijden zijn verschillende prijzen verbonden. Deze zijn te winnen in de categorieën beste robotprestatie, robotontwerp, onderzoeksproject en teamwork. De hoofdprijs gaat naar het team dat in alle categorieën het beste presteert. Informatie Meer informatie over de FIRST LEGO League is te vinden op www.firstlegoleague.nl. Op deze website kunnen teams zich inschrijven. Stichting Techniekpromotie uit Eindhoven ontwikkelt en ontplooit verscheidene activiteiten die jongeren bewust maken van de belangrijke rol die techniek en technologie in onze samenleving hebben. Dit doet zij landelijk met een regionale focus in samenwerking met verschillende landelijke en regionale partners.
In januari 2010 zal de Benelux finale van de First Lego League (FLL) plaatsvinden op de Hogeschool Arnhem-Nijmegen (HAN). Deze finale zal samen met stichting Techniek promotie georganiseerd worden door het Kenniscentrum Bèta Techniek. Het thema voor de aankomende editie is Smart Move, Transport transformeren.
De First Lego League (FLL) is een wedstrijd die jongeren tussen de 9 en 14 jaar uitdaagt om de maatschappelijke rol van techniek en technologie te onderzoeken aan de hand van verschillende opdrachten. De opdrachten hebben elk jaar een wisselend thema.
De opdrachten zijn:
Internationaal In 2008/2009 deden er wereldwijd al meer dan 135.000 kinderen mee verdeeld over 45 verschillende landen, waaronder o.a.: Noord-Amerika, Singapore, Engeland, Oostenrijk, Zwitserland, Denemarken, China, Nederland en Zuid-Afrika. De winnaar van de Benelux finale gaat door naar de wereld finale. Vanaf 1 april kan ingeschreven worden voor de First Lego League via de website van Stichting Techniekpromotie.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
FLL teams...
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Teams betalen 125 euro inschrijfgeld voor het project (een robotset schaffen ze zelf aan) en hebben tot half september de tijd om met hun robot en software te oefenen. Daarna worden de opdrachten (missies) bekendgemaakt en worden het wedstrijdveld en de missiemodellen van LEGO® verstuurd. Daarna hebben de teams minimaal acht weken de tijd om hun robot en onderzoekspresentatie voor te bereiden voor de finaledag in hun regio.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Missies: De Smart Move Robotcompetitie geeft je ervaring uit eerste hand in het ontwerpen van een voertuig (jouw robot) die is voorzien van sensoren om toegang te krijgen tot plaatsen en dingen, terwijl je botsingen vermijdt of overleeft, en dit alles in een testomgeving …
Stel je voor dat je een voertuig zou kunnen programmeren om je ergens naartoe te laten brengen, of dat het zelfs op zichzelf daar naartoe zou kunnen gaan … Stel je voor dat ieder voertuig weet waar al de andere zijn … Stel je voor dat voertuigen elkaar en de dingen om hen heen zouden kunnen ontwijken … Stel je voor dat voertuigen geprogrammeerd kunnen worden om te vermijden dat ze verkeersopstoppingen veroorzaken of er in terecht komen. Zouden er dan nog verkeerslichten nodig zijn?
Als deze voertuigen elkaar zouden raken … - Hoe zouden ze gebouwd kunnen worden om passagiers echt veilig te vervoeren? - Hoe zouden ze gebouwd kunnen worden om te vermijden dat ze vast komen te zitten of beschadigd raken?
Is het je opgevallen dat waar jij woont, de meeste voertuigen maar gedurende een deel van de dag worden gebruikt? - Hoe zou het aantal voertuigen in jouw omgeving verminderd kunnen worden?
Welke nieuwe technologieën zouden jouw noodzaak tot reizen kunnen wegnemen? Naast verbeelden en afvragen … Probeer sommige van deze dingen zelf uit!
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
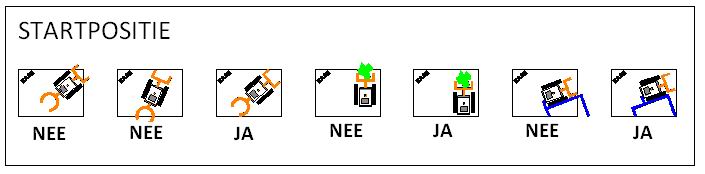
KRIJG TOEGANG TOT PLAATSEN (kies er een) … Verplichte voorwaarde: Jouw robot moet op het moment dat de wedstrijd eindigt, op exact een van deze posities zijn (deze missie heeft geen invloed op de andere): |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
Doelwit
– Verplichte voorwaarde: Geparkeerd op de
bestemmingsmarkering terwijl tenminste één van de aangedreven wielen of
rupsbanden de ronde bestemmingsmarkering raakt.
Score: 25 punten |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
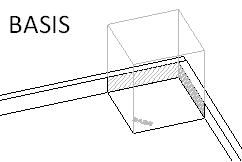
Gele
brug plateau – Verplichte voorwaarde: Geparkeerd
waarbij tenminste één van de aangedreven wielen of rupsbanden jouw gele
brugbedekking raakt, maar daarbij mag rode bedekking of de mat niet
geraakt worden.
Score: 20 punten |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |
Voertuig
delen – Verplichte voorwaarde: Geparkeerd waarbij
tenminste één van de aangedreven wielen of rupsbanden de rode
brugbedekking raakt, maar niet de mat.
Score: 25 punten |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| KRIJG TOEGANG TOT DINGEN … | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
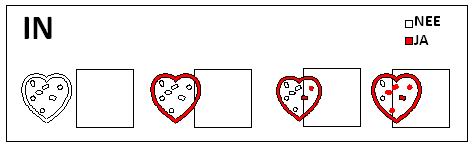
Toegangstekens
–
Verplichte voorwaarde:
Toegangstekens
(4) moeten in hun “omlaag” positie staan. Score: 25 punten per stuk. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
Lussen
– Verplichte voorwaarde: De lussen (11) moeten in de basis zijn. Score:
10 punten per
stuk. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| BONUS: Nieuwe technologieën kunnen soms jouw noodzaak tot reizen wegnemen. Ze zijn moeilijk om te ontwikkelen, maar elke nieuwe maakt de komst van de volgende makkelijker … Als alle grijze lussen (3) de basis hebben bereikt, mag je een rode lus met de hand naar de basis brengen. Onafhankelijk daarvan, als alle drie de rode lussen de basis hebben bereikt, mag je een lus van een willekeurige kleur met de hand naar de basis brengen. Eenmaal verdiend, mogen deze handmatige vrijheden (welke een speciale uitzondering op de regels vormen) op ieder moment gebruikt worden vóór het einde van de wedstrijd. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| VERMIJD BOTSINGEN | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
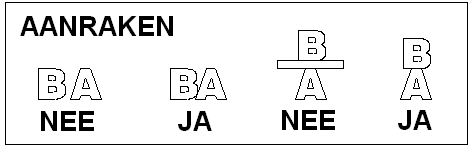
Waarschuwingstekens
– Verplichte voorwaarde:
De waarschuwingstekens (8) moeten rechtop staan (haaks op de mat). Score: 10 punten per stuk. LET OP: De waarschuwingstekens zijn de aanrakingspenalty objecten van dit seizoen … Dit betekent dat als je jouw actieve robot aanraakt terwijl deze volledig buiten de basis is, zullen de scheidsrechters per keer één rechtop staand waarschuwingsteken verwijderen. De waarschuwingtekens worden in zuid-noord volgorde verwijderd en vervolgens van west naar oost. Als er op het moment van aanraking geen rechtop staande waarschuwingstekens zijn, dan is er geen penalty. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
Sensor
muren (vermijd optie)
– Verplichte voorwaarde: Sensor muren (4) moeten rechtop staan (haaks op
de mat). Willekeurig welke muren kunnen meetellen. Niet meer dan vier
muren kunnen meetellen. Iedere rechtop staande sensor muur vereist ook een
“neerwaarts” toegangsteken. Voorbeeld: Wanneer er vier rechtop staande
muren zijn maar slechts drie toegangstekens staan omlaag, dan tellen er
maar drie muren.
Score: 10 punten per stuk, met een maximum van 40 punten. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| OVERLEEF BOTSINGEN … | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |
Sensor
muren (botsing optie)
– Verplichte voorwaarde: Geen (nul) sensor muren staan rechtop.
Score: 40 punten |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
Voertuig
botsingtest –
Verplichte voorwaarde: De vrachtwagen mag de rode hefboom van de oprit
niet raken. De robot moet volledig buiten de basis zijn wanneer deze de
missie uitvoert, anders verwijdert de scheidsrechter twee rechtop staande
waarschuwingstekens (in dezelfde volgorde als bij twee
aanraakpenalty’s).
Score: 20 punten |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
Enkele
passagier veiligheidsgordel test – Verplichte
voorwaarde: De botsproefpassagier moet gedurende de gehele wedstrijd aan
boord van jouw robot zijn. De eerste keer dat jouw robot de passagier niet
meeneemt, verwijdert de scheidsrechter de passagier. Ieder veiligheidsgordel
systeem is goed zolang de passagier snel losgemaakt kan worden na afloop
van de wedstrijd.
Score: 15 punten |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
Meervoudige
passagier veiligheidstest –
Verplichte voorwaarde: Alle vier de personen moeten zitten of staan in of
op een door jou ontworpen vervoermiddel en een deel van dit object bevindt
zich in het ronde doelwit.
Score: 10 punten |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Veldopbouw.
OVERZICHT - Het veld is de plek waar de robotcompetitie plaatsvindt. - Het bestaat uit een wedstrijdmat, op een tafel, met missiemodellen daarop opgesteld. - De wedstrijdmat en de LEGO stenen voor het bouwen van de missiemodellen maken onderdeel uit van de "Challenge Set". - De instructies voor het bouwen van de missiemodellen staan op een CD, in dezelfde doos als de LEGO stenen. - De instructies voor hoe je de tafel moet bouwen, en hoe de missiemodellen geplaatst moeten worden, vind je hier.
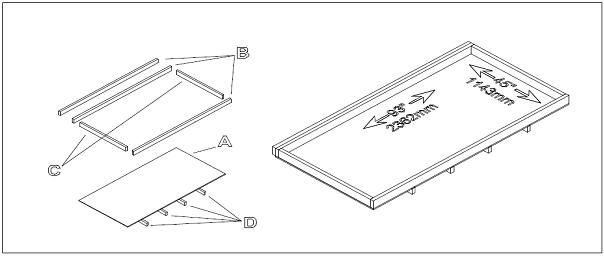
CONSTRUCTIE TAFEL De robotcompetitie vindt plaats op een speciaal ontworpen tafel. Als je nog niet de beschikking hebt over zo’n tafel, zul je er dus één moeten bouwen. Met veiligheid, gewicht, hoogte en de kosten in het achterhoofd wordt hier een simpel ontwerp geboden. Maar, zolang het oppervlak glad is en de randen goed geplaatst zijn, is het aan jou hoe de ondergrond gebouwd wordt. De constructie is eenvoudig, maar vereist wel wat werkplaatsvaardigheden. Tijdens een toernooi worden twee tafels naast elkaar opgesteld, maar je komt maar aan één kant in actie, dus je hoeft maar een kant te bouwen om op te oefenen. Aangezien een toernooi opstelling een dubbele wand heeft op het interactieve gebied waar de twee tafels elkaar raken, moeten oefentafels een extra wand van het type B hebben aan de gemeenschappelijke zijde. Daarom zijn hier instructies voor het bouwen van een "halve tafel" met een dubbele noordzijde:
Materialen
Onderdelen
Montage Stap 1 Bepaal welke kant van het triplex of multiplex tafel oppervlak (A) de minst vlakke is, en gebruik deze als de onderkant. Schroef de versteviging (D) vast aan de onderkant (ongeveer iedere 45 cm). Controleer of de schroeven volledig zijn aangedraaid en niet uitsteken. Schuur eventuele splinters. Stap 2 Schroef de randen (B, C) vast aan de bovenkant rond de bovenomtrek van het triplex of multiplex tafeloppervlak (A). De muur-tot-muur afmetingen moeten voldoen aan de maten 2362 ± 3 mm / 1143 ± 3 mm. Stap 3 Plaats met de hulp van een andere persoon deze tafel op korte schragen (of melk kratten, of iets anders dat kort en stevig is).
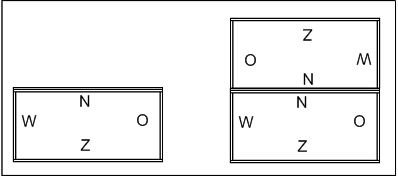
PLAATSING WEDSTRIJDMAT Stap 1 Maak het tafeloppervlak schoon met een stofzuiger. Zelfs het kleinste onderdeeltje onder de mat kan problemen veroorzaken voor de robot. Na het stofzuigen wrijf je met de hand over het oppervlak en schuur of vijl alle uitstekende oneffenheden die je tegenkomt. Daarna nog een keer stofzuigen. Stap 2 Rol de mat uit op het gezogen oppervlak (rol nooit de mat uit op een gebied waar het losse onderdeeltjes kan oppikken), zodat de afbeelding naar boven wijst en de noordzijde naar de noord (dubbele) wand van de tafel wijst (let op de plaatsing van de dubbele zijde op alle tafelafbeeldingen hieronder). Stap 3 De mat is kleiner dan het speeloppervlak zoals ontworpen. Schuif en richt de mat zo dat er geen ruimte is tussen de zuidzijde van de mat en de zuidelijke afscheidingswand. Centreer de mat in oost-westelijke richting (let op gelijke ruimten aan de linker en rechterkant). Stap 4 Met behulp van anderen, trek je aan beide uiteinden van de mat en wrijf iedere golving weg vanuit het midden en controleer nog een keer de vereisten van stap 3. Naar verwachting zal er enige golving blijven, maar dat zou geleidelijk minder moeten worden. Er zijn teams die een haardroger gebruiken om de vermindering van het golven te versnellen.
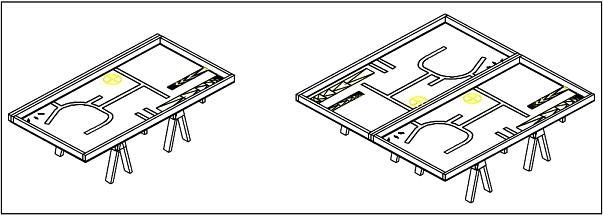
CONSTRUCTIE MISSIEMODELLEN Bouw de missiemodellen – Gebruik de LEGO elementen en instructie CD uit de Challenge set. Het kost één persoon ongeveer 2 tot 3 uur om de modellen te bouwen, dus we raden je aan om het in teamverband te doen. Als er teamleden zijn die weinig tot geen ervaring hebben met het bouwen van LEGO, is het bouwen van de missiemodellen een goede oefening. Het bouwen in teamverband is ook een goede gelegenheid om de teamleden aan elkaar te laten wennen. OPSTELLING MISSIEMODELLEN Dual Lock Voor de modellen waar "Dual Lock Nodig" vermeld staat in de Missiemodel details hieronder, betekent dit dat het model vastgemaakt moet worden aan de mat tijdens gebruik. De verbinding wordt gemaakt door gebruik van herbruikbaar bevestigingsmateriaal van 3M genaamd Dual Lock, dat meegeleverd wordt in de doorzichtige zakjes bij de LEGO onderdelen bij je Challenge set. Dual Lock is ontworpen om vast te plakken of te "locken" aan zichzelf, als twee zijden van de tape tegen elkaar aangedrukt worden, maar je kunt het ook weer loshalen voor het gemak van vervoer en opslag. Het bevestigingsproces voor de Dual Lock hoeft maar één keer te gebeuren – daarna kunnen de modellen eenvoudig aan de mat gehecht worden en weer losgemaakt. Om Dual Lock te bevestigen: Stap 1 Plak één vierkantje met de plakkende zijde op de mat op ieder vakje aangeduid met een "X". Stap 2 Druk een tweede vierkantje bovenop deze stukjes, zet ze vast, met de plakkende zijde naar boven. Tip: in plaats van je vinger te gebruiken, gebruik je een stukje wax-papier waarop de plakkertjes zaten. Stap 3 Plaats het model op de plakkertjes. Waarschuwing: Let er op dat je ieder vierkantje precies op zijn vakje plaatst en ieder model precies op de markering. Waarschuwing: Als je het model aandrukt, druk dan op de laagste vaste onderdelen in plaats van het hele model in elkaar te duwen. Trek aan diezelfde onderdelen als je het model later van de mat moet verwijderen. Tip: Voor grote / flexibele modellen breng de Dual Locks in één of twee paren tegelijkertijd aan.
Model specificaties
Botsproef
drempel -
Dual Lock Nodig – Let erop dat je dit model niet
vervormt als je het bevestigt. Plaats de scharnierende ‘hek-achtige’
structuur rechtop (met de rode hefboom op zijn hoogst mogelijke punt,
bekeken met het oog). Vrachtwagen – Geen Dual Lock – De vrachtwagen staat gericht naar de onderkant van de drempel met de achteras vastgehouden door de rode hefboom van de drempel. De vrachtwagen moet gecentreerd worden op en parallel lopen met de oprit. Het centreren van de vrachtwagen en het parallel lopen moeten op het oog perfect afgesteld zijn, met het besef dat onvolkomenheden hier verwachte/acceptabele variabelen toevoegen aan het spel.
Geleide muren – Dual Lock Nodig – Twee geleide muren staan in het zuidoosten en één staat net ten noorden van de basis. Heel eenvoudig!
Sensor muren – Geen Dual Lock – Zet vier sensor muren op hun markering in het noordoosten, met de ‘LEGO-nopjes’ omhoog. De laatste ligt plat over de top van de drie lange zwarte cilindrische kolommen. Plaats de vierkante basis van deze kolommen op hun markering ten westen van de brug, richting het noorden. Balanceer daarna zorgvuldig de sensor muur er bovenop, met de ‘LEGO-nopjes’ richting het zuiden.
Lussen – Geen Dual Lock – Er zijn 11 lussen. Acht van hen staan op de mat op hun corresponderende gekleurde markeringen met hun lussen gericht zoals aangegeven. De resterende twee grijze en de rode worden op andere modellen geplaatst, met hun lussen parallel aan de lange scheidingsmuur. Zet een grijze lus centraal op de sensor muur op de kolommen. Zet de andere grijze lus op de zuidwest as van de zuidelijke geleide muur. Zet de rode lus centraal op de meest oostelijke as van de zuidelijke geleide muur. Let er op dat alle lussen verticaal staan. Mensen
en Botsproef-persoon – Geen Dual Lock – Zet deze vijf modellen
in de basis. Hun exacte positie is onbelangrijk.
ONDERHOUD WEDSTRIJDVELD Grens muren Verwijder alle zichtbare splinters en bedek alle duidelijke gaten. Wedstrijdmat Let er op dat de mat de zuidelijke grensmuur raakt en gecentreerd ligt van oost naar west. Vermijdt schoonmaken van de mat met alles dat resten achter kan laten. Alle aanslag/restanten, plakkerig of glad, zal de prestatie van de robot beïnvloeden in vergelijking met een nieuwe mat (veel toernooien gebruiken nieuwe matten). Gebruik een stofzuiger en/of vochtige doek om stof en vuil (boven en onder de mat) te verwijderen. Let er op, bij het verplaatsen van de mat voor transport en opslag, dat de mat niet in een scherpe knik buigt, want dit zou de beweging van de robot kunnen beïnvloeden. Toernooien die nieuwe matten gebruiken, zouden hun matten zo ruim van tevoren als mogelijk moeten uitrollen. Om extreem krullen van de oost of west uiteinden van de mat te beperken, wordt tape toegestaan, met een maximum van ongeveer 6 mm overlap. Schuimtape is niet toegestaan! Missiemodellen Houdt de modellen in hun oorspronkelijke staat door vaste verbindingen vaak recht te zetten en vast te maken. Zorg ervoor dat draaiende assen vrij kunnen draaien door te controleren of ze soepel draaien en vervang alles wat verbogen is. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Wedstrijdreglement: INLEIDING Sportieve deelnemers Jullie zijn 'sportieve deelnemers'. Dit betekent dat jullie fanatiek strijden tegen PROBLEMEN, terwijl jullie MENSEN met respect en vriendelijkheid behandelen - mensen van jullie eigen team én mensen van andere teams. Je bouwt voort op ideeën van andere mensen in plaats van ze te weerstaan of te dwarsbomen. Doel Interesse in vernieuwing en ontwikkeling van techniek … FLL is een technische ervaring die zo leuk is, dat je vergeet dat het om iets technisch gaat. Al gauw kom je erachter dat techniek leuk is en zul je meer willen weten. FLL gebruikt de competitie als een opwindende motivator voor ideeën, oplossingen, processen en uitvindingen die niemand eerder heeft gezien. Zelfstandigheid De FLL Robotcompetitie moet gespeeld worden door een "autonome" robot. Dit betekent dat de robot niet beïnvloed mag worden door jou, terwijl deze actief is. Maar de meeste teams moeten hun robot eens of meerdere keren onderbreken tijdens de wedstrijd. Dus het is toegestaan om dit te doen, maar het vereist altijd een herstart vanaf de basis en er volgt een penalty. Als een detail niet genoemd wordt, dan is het niet belangrijk Er vanuit gaande dat je al de missies, regels en V&A’s hebt gelezen … Als er geen bepaalde methode vereist is, dan is iedere methode oké. Als iets niet specifiek vereist is, dan hoef je het niet te doen. Als er geen beperking is tegen iets, dan is het toegestaan. Er zijn geen verborgen vereisten of beperkingen. Maar er zijn verborgen vrijheden – waarin, dat zeggen de regels niet. REGELS 1. Deelname a. Het maximum aantal deelnemers per team is tien leden, exclusief de coaches en mentoren. b. Raadpleeg voor toegestane leeftijden de 'FIRST LEGO League voorwaarden' (zie het teampakket of de website, klik op ‘VOOR TEAMS’, en vervolgens op ‘OPSTARTEN’). c. Tijdens het toernooi worden slechts twee teamleden tegelijk aan de wedstrijdtafel toegelaten, behalve tijdens noodreparaties. d. De rest van het team moet wegblijven van de tafel, maar dichtbij genoeg voor de verschillende teamleden om te wisselen tijdens de wedstrijd (taggen). Specifieke positionering wordt bepaald door de hoofdscheidsrechter die ieder toernooi leidt. 2.
Materialen a. Alles waarmee je meedoet, moet van LEGO onderdelen gemaakt zijn in hun oorspronkelijke staat, met uitzondering van LEGO touw en slangen welke je op maat mag afsnijden. Het is toegestaan om een papieren overzicht van welke programma’s bij welke missies horen mee te nemen naar de wedstrijdtafel. b. Er zijn geen beperkingen op de hoeveelheden of bronnen van niet-elektrische LEGO elementen, uitgezonderd fabrieksmatige opwindbare en terugtrek “motoren” die niet zijn toegestaan. Pneumatische onderdelen zijn wel toegestaan. c. De elektrische elementen die gebruikt worden, moeten van het LEGO MINDSTORMS type zijn. Het totaal aantal elektrische elementen dat je mag gebruiken in een wedstrijd is als volgt:
d. Voorbeeld 1: Als jouw robot drie motoren heeft, mag je niet nog een andere motor in het wedstrijdgedeelte hebben, zelfs als deze alleen maar als gewicht of versiering dient; zelfs als deze in een doos zit buiten het veld. e. Voorbeeld 2: Als jouw robot twee motoren heeft, maar je moet meerdere hulpstukken motoriseren, dan moet je een manier bedenken om de derde motor van het ene hulpstuk naar het volgende over te zetten. f. LEGO kabels en convertor kabels zijn toegestaan waar nodig. g. Reserve/alternatieve elektrische onderdelen zijn toegestaan in de pit area. h. Computers zijn niet toegestaan in het wedstrijdgedeelte. i. Voorwerpen die dienen als afstandbediening zijn nergens toegestaan. j. Een markeerstift mag gebruikt worden voor eigendomsidentificatie maar alleen op verborgen plaatsen. k. Verf, tape, lijm, olie etc. zijn niet toegestaan. l. Stickers zijn niet toegestaan behalve LEGO stickers die volgens LEGO instructies moeten worden aangebracht. m. Je mag niet meer dan één robot in één en dezelfde wedstrijd gebruiken, maar je mag wel een andere robot gebruiken in een andere wedstrijd. n. Als de robot in overtreding is – wat betreft deze regels of de Software (3) regels – en deze kan niet gecorrigeerd worden, dan rust de beslissing bij de hoofdscheidsrechter van het toernooi over wat er precies gaat gebeuren, maar deze robot mag geen prijzen winnen. a. Jouw robot moet geprogrammeerd worden met behulp van LEGO MINDSTORMS, RoboLab, of NXT software (ongeacht welke versie). b. Patches, randapparatuur, en nieuwe versies van de toegestane software van de fabrikanten (LEGO en National Instruments) zijn toegestaan. c. Het gebruik van op tekstgebaseerde en/of “externe” software is niet toegestaan. d. De reden voor deze regel is dezelfde als die van de Materialen (2) regels: aangezien we niet kunnen garanderen dat alle teams gelijkwaardig begeleid worden, beperken we deze mogelijke ongelijkheid tenminste door een limiet te stellen aan de mogelijkheden van de instrumenten. 4. Downloaden en draadloze signalen a. Het downloaden van programma’s naar de robot mag alleen in de pit area plaatsvinden – nooit in het wedstrijdgedeelte. b. Teams die gegevens downloaden naar een RCX robot moeten zich er van verzekeren dat het proces is afgeschermd, dat er geen andere RCX robots binnen bereik zijn en robots moeten uitgeschakeld zijn wanneer ze niet in gebruik zijn. c. Teams die gegevens downloaden naar een NXT robot moeten dit via een kabel doen. Bluethooth moet te allen tijde uitgeschakeld zijn. a. Het veld is de plek waar de robotwedstrijd plaatsvindt. b. Het bestaat uit een missiemat, op een tafel met de missiemodellen in positie er bovenop c. De missiemat en de LEGO stenen voor het bouwen van de missiemodellen zijn onderdeel van jouw ‘Challenge Set’. d. De instructies voor het bouwen van de missiemodellen staan op een CD, in dezelfde doos als de LEGO stenen. e. Alle andere veldopbouw instructies zijn te vinden in de veldopbouw instructie (zie op de website ‘CHALLENGE’ en vervolgens op ‘VELDOPBOUW’). 6. Basis a. De basis is een volume. De basis is niet alleen een plek op de mat. b. De basis is een denkbeeldige doos gevormd door verticale muren die omhoog komen vanaf de omtrek van het basisgebied, inclusief de binnenzijde van de randen van de tafel en door een onzichtbaar plafond van 40 cm hoog. c. De basis is waar jouw robot voorbereid en bediend wordt. d. De basis is waar jouw robot altijd van start gaat en herstart. e. De basis is vaak een scorend doel.
a. Onthoudt bij het bouwen en programmeren dat onze fabrikanten, sponsoren en vrijwilligers alle moeite doen om te garanderen dat alle velden juist en identiek zijn, maar je moet altijd rekenen op enige variabiliteit, zoals:
bij veel toernooien is het onmogelijk om de matten ruim van tevoren uit te rollen om hun golving kwijt te raken. De plaats en hevigheid van het golven varieert. Je bent hierbij gewaarschuwd. Houdt hier rekening mee bij het ontwerpen. b. Twee belangrijke bouwtechnieken die je kunt gebruiken om de gevolgen van de variabiliteit te beperken zijn
c. Vragen over de condities bij een specifiek toernooi moeten gesteld worden aan de hoofdscheidsrechter van dat evenement. a. De missie wordt gekenmerkt door een resultaat of actie die punten waard is. b. Jij beslist in welke volgorde je de missies wilt volbrengen en je hoeft ze niet allemaal te proberen. c. Het is toegestaan om ze opnieuw te proberen, maar vaak is dat niet meer mogelijk. 9. Wedstrijd a. Bij een toernooi grenzen twee wedstrijdvelden aan elkaar en wordt je tegenover een ander team opgesteld om tegen elkaar te strijden in een wedstrijd. Hier volgt het proces .
b. Er zijn tenminste drie wedstrijden en elke wedstrijd is een nieuwe kans voor jou om je beste score te halen. c. Geen wedstrijd heeft iets te maken met een andere en alleen jouw beste score telt voor de Champion’s Award. Punten behaald in de (halve) finales worden niet meegenomen voor de Champion’s Award, maar gelden alleen voor de Robotprestatieprijs. d. Als het vooraf bekend is dat een team geen team tegenover zich zal hebben, zal een vrijwillig of “thuis” team invallen. Als je strijdt tegen een lege tafel, krijg je de punten van iedere interactieve missie. a. Het proces dat alle teams één wedstrijd hebben gespeeld, wordt een ronde genoemd. b. Toernooien draaien ten minste drie rondes. c. Je hebt tussen jouw wedstrijd in de ene ronde en de volgende meestal tijd om naar de pit area te gaan en aan jouw robot te werken en het zo nodig te programmeren, maar de tijd kan beperkt zijn, afhankelijk van het schema van wedstrijden en jureringen. a. Jouw robot is het hoofdobject dat de NXT (of RCX) controller bevat en alles dat er niet vanaf valt wanneer het hoofdobject opgepakt wordt, of omgedraaid (of aangetikt in een willekeurige richting), of geschud. a. Hulpstukken zijn alle onderdelen die ontworpen zijn om toegevoegd en/of verwijderd te worden. a. Strategische objecten zijn objecten die het team meebrengt en die jij of jouw robot mag gebruiken als instrument of hulpstuk. b. JIJ mag strategische objecten alleen in de basis aanraken of gebruiken, maar JOUW ROBOT mag ze overal aanraken of gebruiken. c. Voorbeeld: als je een instrument gebruikt om jouw robot te richten, moet je het instrument of wegtrekken of loslaten voordat de robot mag starten. a. De missiemodellen zijn de objecten die al op een wedstrijdveld staan vóór aanvang van de wedstrijd. b. Je mag geen kopieën van de missiemodellen meebrengen naar de tafel. c. Je mag geen missiemodellen uit elkaar halen, ook niet tijdelijk. d. Missiemodellen moeten zo snel mogelijk na de wedstrijd gescheiden worden van jouw strategische objecten. e. Let goed op dat je de wedstrijdomgeving verlaat ZONDER missiemodellen. a. Nadat de scheidsrechter (de “scheids”) alles inspecteert wat je naar de wedstrijd area hebt gebracht, mag je alles opslaan in een doos op een tafel waar je het makkelijk kan pakken terwijl je de robot bestuurt. b. Teamleden, behalve de twee aan de tafel, mogen niets vasthouden tenzij toegestaan door de scheids. c. Niets is toegestaan op de vloer tenzij goedgekeurd door de scheids. d. Missiemodellen moeten altijd in het zicht blijven van de scheids. e. In zeldzame situaties dat het overvol wordt in de basis, staat de scheids het toe om objecten op te slaan buiten de basis, maar alleen als het duidelijk is dat de plaatsing alleen dient voor opslag. 16. Voorbereiding en bediening van de robot a. Voor de wedstrijd, en op ieder moment dat jouw robot inactief is, is het toegestaan om hem vast te pakken en handmatig voor te bereiden voor de volgende actieve sessie. b. Typische voorbereidingen omvatten reparaties, het verwisselen van hulpstukken, het laden en lossen van objecten, het selecteren van programma’s, het resetten van toepassingen, en manipuleren en richten van de robot en alle objecten die het zal verplaatsen of gebruiken. c. Dit werk moet gedaan worden in of bij de basis om te voorkomen dat het veld vernield wordt. Als jouw robot en zijn objecten klaar zijn voor de start, is het laatste wat je moet doen, alles loslaten. a. Je mag geen dingen verlengen / uitsteken, achterlaten, of buiten de basis plaatsen, zelfs gedeeltelijk, behalve zoals beschreven in de Start procedure (19) en Huishouding (15) regels. b. Je mag niets verplaatsen of 'aanpassen` buiten de basis. c. Binnen de basis, is het toegestaan om objecten te manipuleren die de basis hebben bereikt, zelfs om scorende situaties tot stand te brengen. d. Je kunt objecten (volledig) binnen de basis plaatsen om door een actieve robot op te laten halen, maar alleen als je deze duidelijk losgelaten hebt voordat de robot ze raakt. e. Zodra jouw robot of een willekeurig iets, wat het strategisch bestuurt, de basis bereikt, mag je alles (inclusief de robot) pakken. f. Iets laten vallen op een actieve robot wordt gezien als het aanraken van een actieve robot. a. Voor alle starten aan het begin en gedurende de wedstrijd geldt dat ieder deel van jouw robot en zijn hulpstukken en alle objecten die het gaat verplaatsen of gebruiken, volledig binnen de basis moeten passen. b. Niets mag buiten het denkbeeldige volume van de basis steken. c. Jouw robot mag, maar hoeft niet, objecten aanraken die het gaat verplaatsen of gebruiken. d. Je mag jouw robot niet aanraken en ook niet dat wat het gaat gebruiken of verplaatsen. e. Alles moet bewegingloos zijn.
a. Als voor de scheids duidelijk is dat de startpositie juist is …
b. Misschien heb je jouw robot niet vast, of iets dat het gaat verplaatsen of gebruiken gedurende het aftellen. Als dit wel het geval is, laat de scheids je opnieuw starten. De reden van deze regel is te garanderen dat jouw enige invloed op jouw robot is dat het programma op gang wordt gebracht. c. De exacte starttijd is aan het begin van het laatste woord in de countdown, zoals “Klaar voor de start, AF!” d. Als een ander teken wordt gebruikt, is de start aan het begin van dat signaal. 20. Actieve robot 1 Inactieve robot a. Op het moment dat jouw robot wordt gestart, wordt deze “actief” en dat blijft het tot de volgende keer dat je hem raakt, of door iets dat hem strategisch bestuurt. b. Op het moment van die aanraking wordt de robot inactief en moet het teruggebracht worden naar de basis tenzij het al daar is. Er kunnen aanvullende gevolgen zijn, zie Actieve robot aangeraakt terwijl deze volledig buiten de basis is (21). c. De inactieve robot in de basis mag dan vastgepakt worden en geprepareerd en opnieuw gestart. 21. Actieve robot aangeraakt terwijl deze volledig BUITEN de basis is Als de robot en ieder object binnen zijn strategische controle volledig buiten de basis zou zijn op het moment van aanraken, zijn de gevolgen: a. Een “aanraak penalty object” wordt uit het spel gehaald als deze beschikbaar is, zoals beschreven in de missies. b. Objecten die bij de robot waren tijdens de laatste keer dat deze de basis verliet gaan terug naar de basis om te scoren of verder gebruik. c. Objecten die niet bij de robot waren tijdens de laatste keer dat hij de basis verliet, worden uit het spel genomen (mogen niet opnieuw gebruikt worden). 22. Actieve
robot aangeraakt IN de basis a. Er is geen “aanraak penalty”. b. Deze objecten worden in de basis geplaatst om te scoren of verder gebruik. a. Als het enige onderdeel van jouw robot in de basis op enig moment van een actieve robot een koord, draad, buis, ketting of touw is, wordt de robot gezien alsof het volledig buiten de basis is. a. Als een niet aangeraakte robot contact verliest met een object, blijft dat object waar het is tenzij/totdat de robot het contact ermee hersteld. Zulke objecten mogen niet met de hand gepakt worden. b. Voor uitzonderingen verwijzen we naar Zwervende objecten (25) en Schade aan de robot (26) regels. a. Objecten die door de schuld van welke robot dan ook in een niet-scorende positie zijn geraakt, mogen op verzoek, door de scheids uit het spel gehaald worden, of door jouw als de scheids te ver weg is om op tijd te handelen. Objecten die “uit het spel zijn gehaald” mogen niet opnieuw gebruikt worden. b. Objecten in hun originele “opstelling” worden nooit als zwervend beschouwd. c. Objecten in een scorende positie worden nooit als zwervend beschouwd. a. Je mag op ieder moment onderdelen van de robot pakken die loskomen als gevolg van duidelijke onopzettelijke schade. b. Je mag dit met de hand doen of aan de scheids vragen. c. Onderdelen die bedoeld of ontworpen zijn om los te komen, zijn Strategische objecten (13) en vallen onder de Verlies van contact (24) regel. a. Schade aan het veld wordt als volgt omschreven:
b. Als schade aan het veld zich voordoet, dient de scheids de conditie van het veld, vlak voor de schade, te herroepen en het veld in die conditie te herstellen. c. Schade aan het veld die te ernstig is om te herstellen wordt zo gelaten, of schoongemaakt. d. Als er na schade aan het veld, door een fout ontwerp van het model, de constructie of de opstelling, onduidelijkheid is of er punten gescoord zijn, zijn de punten voor jou. e. Het is geen schade aan het veld en het veld wordt niet hersteld als jouw robot gewoon niet doet wat jij wilt. a. Jouw robot mag geen enkel effect hebben op de robot van het andere team, veld of strategie, behalve bij het voltooien van de scorende eisen van de missies in gebieden die worden gedeeld tussen de twee zijden binnen het ontwerp van de Challenge. b. Er is altijd tenminste een missie waar jij en het andere team worden gestimuleerd om op de een of andere manier interactie hebben met elkaar, hetzij concurrerend of samenwerkend … c. Bij toeval kan het voorkomen dat het andere team in staat is je te verslaan, of juist niet in staat is om samen te werken bij deze gedeelde missie. Dit wordt niet gezien als beïnvloeding. 29. Uiteindelijke toestand van het veld a. Om controverse te beperken over wat er tijdens een wedstrijd is gebeurd, WORDT DE SCORE AAN HET EIND VAN DE WEDSTRIJD BEPAALD, OP DE MOMENTOPNAME VAN HET VELD OP PRECIES DAT MOMENT. b. Dit betekent dat er geen punten worden gegeven voor resultaten die jouw robot heeft behaald maar voor het einde van de wedstrijd verspeelt. c. Dit is ook waarom acties die niet worden toegestaan (overtreden van de regels) ofwel worden gestopt of worden teruggedraaid op het moment dat ze plaatsvinden. a. A is “in” gebied B als (een gedeelte van) A op (een gedeelte van) gebied B is. b. Nauwelijks “in” wordt beschouwd als “in” tenzij het woord “volledig” wordt gebruikt. c. Direct contact (aanraken) maakt geen onderdeel uit van de omschrijving “in”. d. Objecten in een container worden individueel beoordeeld, en onafhankelijk van hun container. e. Uitzondering: objecten die met jouw robot terugkomen naar de basis worden gezien als IN zodra de robot de basis bereikt.
a. A “raakt” B aan alleen als A direct contact maakt met B. b. Iedere mate van direct contact telt als aanraken.
a. Je krijgt het voordeel van de twijfel als:
b. Als je het niet eens bent met de scheids en op een respectabele manier voldoende twijfel kunt wekken, overlegt de scheids samen met de hoofdscheidsrechter en het resulterende besluit is definitief. c. Deze regel is er niet om de scheidsrechters soepel te laten zijn, maar is een vergunning voor hen om een oordeel in jouw voordeel te vellen, als dit redelijk is. a. Als er een conflict is tussen foto’s/video’s en tekst, krijgt de tekst voorrang. b. Als er een conflict is tussen een missie en een regel, krijgt de missie voorrang, maar de geldige V&A pagina op de website krijgt absolute voorrang. ZORG ERVOOR DAT JE DEZE REGELMATIG RAADPLEEGT. c. De hoofdscheidsrechter is niet verplicht beslissingen van eerdere toernooien te overwegen tenzij deze beslissingen aan de laatste V&A pagina zijn toegevoegd. a. Niemand mag ook maar iets aan het veld aanraken … b. Eerst heeft de scheids tijd nodig om de situatie van het veld op te nemen, en in overeenstemming te komen met jou over welke punten er gescoord zijn of gemist en waarom (en om er zeker van te zijn dat je niet met enig missiemodel wegloopt!). De gegevens worden genoteerd op papier dat door een teamlid wordt afgetekend. c. De scores worden berekend op de computer, waarbij de winnaar wordt bepaald met behulp van de hoogste scores uit resp. de 1, 2 of 3 ronden. CHALLENGE ONDERSTEUNING a. Officiële robot wedstrijd ondersteuning is beschikbaar via FLL@techniekpromotie.nl (gebruikelijke reactie binnen 1-2 werkdagen). b. Voordat je een e-mail verstuurt, let er op dat je de Veldopbouw, de missies, deze regels en de geüpdate V&A hebt gelezen, want FLL@techniekpromotie.nl verwijst hiernaar en alleen hiernaar, precies zoals jij en de scheidsrechters verwacht worden te doen. c. E-mailreacties die je krijgt, zijn er alleen om je de weg te wijzen. De scheidsrechters zijn niet verplicht om ze te lezen. d. Als je e-mailt, vermeld dan je functie binnen het team (lid, coach, ouder, mentor). e. FLL@techniekpromotie.nl kan je helpen de op regels gebaseerde paden der redelijkheid te hanteren om speciale strategieën of situaties toe te passen. f. FLL@techniekpromotie.nl kan het antwoord op jouw vraag op de V&A delen als de vraag populair is, ontbrekende of verwarrende teksten onthult, een fout in het spel onthult, een onoplosbaar conflict onthult of verbazingwekkend of vermakelijk is. g. Na maandag 16-11-2009, 12:00 uur worden er geen nieuwe V&A’s gepubliceerd i.v.m. de start van de regiofinales. De V&A pagina wordt heropend op maandag 14-12-2009, 09:00 uur (o.v.b.) en vervolgens gesloten op vrijdag 22-01-2010, 12:00 uur i.v.m. de Benelux finale. h. FLL@techniekpromotie.nl antwoordt niet op vragen over het bouwen of programmeren van de robot (dat is jullie uitdaging). i. Voor niet-FLL-gerelateerde technische ondersteuning van LEGO producten (RIS, Robolab, NXT), neem dan contact op met: LEGO BENELUX BV op 00800 – 5346 5555 (LET OP, dubbel nul! gratis nummer). j. FLL@techniekpromotie.nl antwoordt niet op vragen die in het discussieforum worden gesteld. Het forum is perfect voor het delen van ideeën en het krijgen van tips van andere teams, maar het is GEEN OFFICIËLE BRON VAN ANTWOORDEN. COACH BIJEENKOMST a. Als er een vraag rijst vlak voor het toernooi, is jouw laatste kans deze te stellen tijdens de “Coach Bijeenkomst” (als er een is) op de ochtend van het toernooi. b. De hoofdscheidsrechter en de coaches komen dan bij elkaar om zich bekend te maken en enige onduidelijkheden vóór welke wedstrijd ook begint. c. Gedurende de rest van de dag zijn de beslissingen van de scheidsrechter definitief als je de tafel verlaat. SAMENVATTING VAN BELANGRIJKE WIJZIGINGEN VOOR 2009 a. Het verbod op het vastmaken van dingen aan de missiemodellen is verwijderd. b. De robot en alles wat er bij hoort, mag nu in de basis worden gehaald, zodra iets ervan de basis bereikt (regels 18 en 31). c. Zwervende objecten moeten nu van de tafel gehaald worden als ze verplaatst moeten worden. Verschuiven is niet toegestaan. d. De Aangelijnd (23) regel staat vastbinden toe terwijl het tegelijkertijd teams ervan weerhoudt dit te gebruiken om een aanraak penalty te vermijden. e. De definitie van OP is verwijderd. De Nederlandstalige website over de First LEGO League vind je hier: http://www.usfirst.org/community/fll/content.aspx?id=10498 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Data
finales
Finales FIRST LEGO® League Benelux seizoen 2009/2010 'Smart Move' Hieronder vind je alle data van de regiofinales van de FIRST LEGO® League (FLL) Benelux seizoen 2009/2010 'Smart Move', voor zover deze al bekend zijn. Wil je meer informatie over jouw regiofinale, kijk dan op de pagina Regiopartners voor de contactpersoon van jouw regio.
Internationale toernooien De data voor de internationale toernooien zijn inmiddels allemaal bekend, zie hieronder. Kijk voor meer informatie over de internationale toernooien en hoe jouw team zich hiervoor kan kwalificeren op de pagina Internationale toernooien.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Nieuwsberichten: NXT generation wint prijs in Taiwan (08-06-2010) Teams FFL nog in Atlanta (21-04-2010) Leerlingen niet naar finale First LEGO League i.v.m. aswolk (20-04-2010) Teamwork Jurering Benelux Finale FLL (08-02-2010) Halve finale en finale robotcompetitie FLL (08-02-2010) Benelux Finale FIRST LEGO League de uitslag! (07-02-2010) We gaan de first LEGO League benelux finale verslaan! (29-01-2010) Regiofinale FIRST LEGO League Alkmaar (05-12-2009) Regiofinale FIRST LEGO League Gouda (05-12-2009) Regiofinale FIRST LEGO League Lelystad (05-12-2009) Regiofinale FIRST LEGO League Zwolle (05-12-2009) Thema FIRST LEGO League 2009/2010 bekend, inschrijving van start (29-04-2009) Uitslag Regiofinale FIRST LEGO League Noord Nederland (30-11-2009) Bosschool bouwt robot van LEGO (11-11-2009) Missies First LEGO League Smart Move bekend! (10-11-2009) Thema FLL 2010-2011 bekend: Body Forward (10-11-2009) Junior First LEGO League 2009-2010 (10-11-2009) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


 Brug
–
Brug
– 
 Toegangstekens
–
Toegangstekens
– 
 Dynamometer
– Dual Lock Nodig – Dit model staat in het midden van de
oostelijke helft van het veld, beide uiteinden zijn identiek. Na het
aandrukken moet je testen of de rollers vrij kunnen draaien. Als ze dit
niet doen, druk het model dan zover mogelijk en gelijkmatig aan. Let er op
dat er in de noord-zuid richting bewegingsruimte is voor de assen, en let
op dat ze niet worden verbogen.
Dynamometer
– Dual Lock Nodig – Dit model staat in het midden van de
oostelijke helft van het veld, beide uiteinden zijn identiek. Na het
aandrukken moet je testen of de rollers vrij kunnen draaien. Als ze dit
niet doen, druk het model dan zover mogelijk en gelijkmatig aan. Let er op
dat er in de noord-zuid richting bewegingsruimte is voor de assen, en let
op dat ze niet worden verbogen.